

_1657772558.webp)
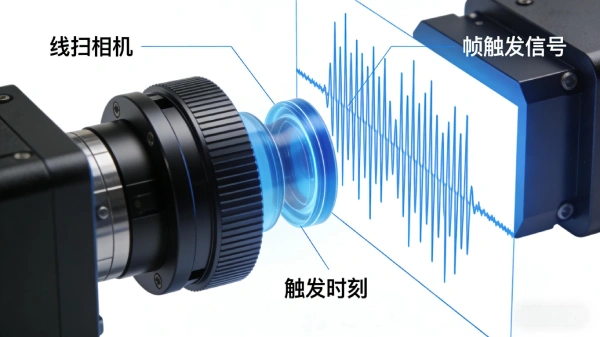
工業線掃相機幀觸發和行觸發有什么區別?
工業線掃相機現在在自動化檢測、逆向工程這些領域用得特別多,幀觸發和行觸發則是它最常用的兩種觸發模式,很多人都會糾結這倆到底咋選、區別在哪,其實核心差異就體現在數據采集方式、適用場景和系統響應速度上,今天就掰開揉碎了跟大家說說。
先說說啥是幀觸發
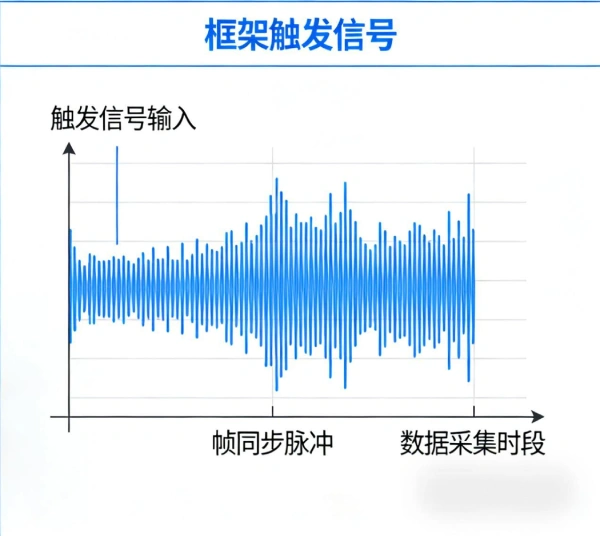
簡單講,幀觸發就是工業線掃相機接到觸發信號后,一次性把整行或者整幀的圖像數據都采集完,相當于 “咔嚓一下拍完一整張”,之后再把所有數據一起傳給控制系統。這種模式對數據同步性要求不高的場景特別適配,比如常規的零件尺寸測量、簡單的表面缺陷檢測,用它就完全夠用。
當然它的優缺點也很鮮明,優勢是操作起來簡單,系統設計的難度也低,上手快;但短板也很突出,如果生產線的運行速度比較快,相機的響應速度跟不上,就容易出現數據滯后、甚至丟幀的情況,要是采集的數據量再大一點,還可能讓系統卡殼。
再來看行觸發,它和幀觸發的邏輯完全不一樣。
行觸發是 工業線掃相機收到觸發信號后,逐行采集圖像數據,而且采完一行就立刻把這行數據傳給系統處理,也就是 “一行一行拍、一行一行傳”,不會等整幀都拍好再傳輸。這種模式的核心優勢就是響應速度快、數據傳輸的實時性強,專門適配高速生產線的檢測需求。
比如汽車零部件檢測中,零件高速從相機前通過時,行觸發能精準保證每一行數據都對齊,不會出現圖像模糊、數據錯亂的問題;但它也有個明顯的缺點,就是系統設計的復雜度高,需要對相機的拍攝和數據的傳輸時序做精準控制,對技術要求會更高。
接下來聊聊兩種模式的適用場景,選對模式的關鍵,其實就是貼合自己的實際應用需求。
如果檢測的對象是靜止的,或者運動速度比較慢,那幀觸發就完全能滿足需求,比如檢測一個靜止的五金零件表面有沒有瑕疵,用幀觸發采集數據快,系統處理起來也輕松,沒必要用更復雜的模式;但如果面對的是高速運動的檢測對象,幀觸發就明顯力不從心了,這時候行觸發就是最優解。
舉兩個常見的例子,食品包裝線上的產品都是高速傳送的,用幀觸發的話拍出來的圖像很容易模糊,檢測結果就不準,而行觸發逐行采集的特性,能保證圖像清晰、檢測精準;還有逆向工程中對產品曲面的掃描,也得用行觸發,因為逐行掃描能最大程度保證數據采集的精度,避免出現偏差。
最后重點說說,到底該怎么選適合自己的觸發模式?
選 工業線掃相機的觸發模式,不用糾結太多,主要看以下四個方面,對照著自己的需求來就行:
第一看檢測對象的運動速度。如果物體移動慢,幀觸發就夠用;但如果是高速運動的物體,那就必須用行觸發,這是最核心的考量因素。
第二看數據精度要求。如果是逆向工程這類對精度要求極高的場景,行觸發肯定更合適,幀觸發大概率會因為數據滯后影響最終的精度;如果是常規檢測,對精度要求不高,幀觸發就沒問題。
第三看團隊的技術能力和系統復雜度要求。幀觸發的系統設計簡單,上手快;行觸發的時序控制復雜,對技術要求高,如果團隊對時序控制這塊不太熟悉,建議優先選幀觸發,避免后期調試出問題。
第四看成本預算。行觸發需要配套更復雜的硬件和軟件,整體成本會更高;如果項目預算有限,且需求能被幀觸發滿足,那選幀觸發會更劃算。
兩種模式的優缺點對比
為了讓大家更直觀地理解,這里簡單對比一下兩種模式的優缺點:
幀觸發和行觸發的區別還挺明顯的,幀觸發是一次性把整行或者整幀的數據采集完,響應速度會慢一些,適合拍靜止的或者移動速度慢的物體,這套方式系統不復雜,成本也比較低;而行觸發是逐行來采集數據的,響應速度快很多,專門用來拍高速運動的物體,不過對應的系統復雜度會高,成本也會更高。
總結一下
工業線掃相機的幀觸發和行觸發,區別主要在于數據采集方式和應用場景。幀觸發簡單易用,適合低速檢測;行觸發響應快,適合高速檢測。選擇哪種模式,關鍵看實際需求。如果團隊不熟悉時序控制,建議先用幀觸發,等熟練后再考慮行觸發。
說到底,沒有絕對的好壞,只有適不適合。了解兩種模式的特性,才能選到最合適的方案。希望這篇文章能

 返回列表
返回列表