

_1657772558.webp)
工業(yè)線掃相機(jī)幀觸發(fā)與行觸發(fā):如何選擇正確的圖像采集模式?
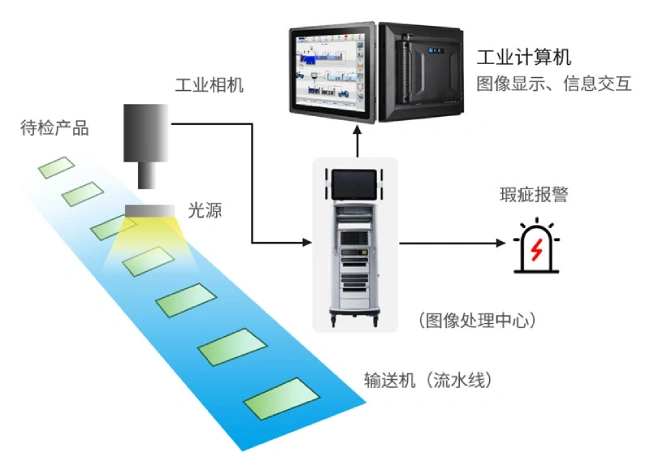
工業(yè)線掃相機(jī)的幀觸發(fā)與行觸發(fā)是決定圖像采集效率與精度的核心設(shè)置。簡(jiǎn)單來說,幀觸發(fā)控制單次完整圖像的采集時(shí)機(jī),行觸發(fā)則控制單行數(shù)據(jù)的捕獲節(jié)奏。兩者的選擇直接影響動(dòng)態(tài)檢測(cè)場(chǎng)景的成像質(zhì)量與系統(tǒng)穩(wěn)定性。
核心區(qū)別與典型應(yīng)用
1. 幀觸發(fā)(Frame Trigger)
- 定義:相機(jī)接收到外部觸發(fā)信號(hào)后,一次性采集全部預(yù)設(shè)行數(shù)的圖像數(shù)據(jù)(如8000行)。
- 特點(diǎn):適用于運(yùn)動(dòng)速度均勻的物體,例如固定視場(chǎng)的PCB板檢測(cè)。觸發(fā)信號(hào)通常來自光電門或定時(shí)器,確保整幀圖像的完整性。
- 案例:某鋼板表面缺陷檢測(cè)線中,相機(jī)通過幀觸發(fā)模式捕捉整幅圖像,系統(tǒng)自動(dòng)識(shí)別劃痕位置并標(biāo)記坐標(biāo)。若觸發(fā)信號(hào)延遲0.1秒,可能導(dǎo)致缺陷區(qū)域被截?cái)啵z率上升15%。
2. 行觸發(fā)(Line Trigger)
- 定義:每接收一個(gè)觸發(fā)脈沖,相機(jī)僅采集一行數(shù)據(jù)。多行數(shù)據(jù)拼接后形成完整圖像。
- 特點(diǎn):適合高速或變速運(yùn)動(dòng)場(chǎng)景,例如布匹連續(xù)生產(chǎn)線的實(shí)時(shí)檢測(cè)。編碼器信號(hào)作為觸發(fā)源,確保每行對(duì)應(yīng)固定物理距離,避免圖像拉伸或壓縮。
- 案例:某紡織廠使用行觸發(fā)模式檢測(cè)布匹密度。當(dāng)輸送帶速度從2m/s突增至3m/s時(shí),編碼器脈沖頻率同步調(diào)整,行觸發(fā)相機(jī)仍能保持每行0.1mm的分辨率,避免因速度波動(dòng)導(dǎo)致的圖像畸變。
5個(gè)常見問題與解答
1. Q:行觸發(fā)是否需要編碼器?
A:是的。行觸發(fā)依賴外部信號(hào)(如編碼器脈沖)控制采集節(jié)奏。若編碼器信號(hào)丟失,圖像將出現(xiàn)斷裂或重復(fù)行。例如,某食品包裝線因編碼器接觸不良,導(dǎo)致行觸發(fā)相機(jī)漏掉3行數(shù)據(jù),最終誤判標(biāo)簽偏移。
2. Q:幀觸發(fā)如何應(yīng)對(duì)運(yùn)動(dòng)物體?
A:幀觸發(fā)要求物體在曝光周期內(nèi)完全靜止。若物體移動(dòng),圖像會(huì)模糊。某玻璃瓶檢測(cè)線中,面陣相機(jī)改用幀觸發(fā)后,因瓶身反光導(dǎo)致局部過曝,最終通過增加偏振濾鏡解決。
3. Q:行觸發(fā)的帶寬需求是否更高?
A:是的。行觸發(fā)需實(shí)時(shí)傳輸多行數(shù)據(jù),對(duì)接口帶寬要求更高。例如,某8K線掃相機(jī)使用行觸發(fā)時(shí),需配置Camera Link接口(帶寬680MB/s),而幀觸發(fā)模式下僅需千兆網(wǎng)口。
4. Q:如何避免行觸發(fā)圖像畸變?
A:需通過分頻器匹配編碼器脈沖與行頻。某案例中,客戶未設(shè)置分頻器,導(dǎo)致每行對(duì)應(yīng)實(shí)際移動(dòng)距離誤差達(dá)0.5mm,最終通過調(diào)整分頻系數(shù)(如100:1)解決。
5. Q:能否同時(shí)使用幀觸發(fā)和行觸發(fā)?
A:可以。例如,某汽車零件檢測(cè)線采用“行觸發(fā)采集+幀觸發(fā)分割”模式:編碼器觸發(fā)逐行采集,當(dāng)檢測(cè)到工件邊界時(shí),幀觸發(fā)保存完整圖像。此方案使檢測(cè)效率提升40%。
實(shí)戰(zhàn)經(jīng)驗(yàn):觸發(fā)模式選擇的三大原則
1. 速度匹配原則
行觸發(fā)需根據(jù)物體速度計(jì)算脈沖頻率。某案例中,客戶誤將編碼器分辨率設(shè)為1000PPR(每轉(zhuǎn)脈沖數(shù)),實(shí)際線速度需達(dá)到25000mm/s才能滿足行頻要求,最終通過更換2000PPR編碼器解決問題。
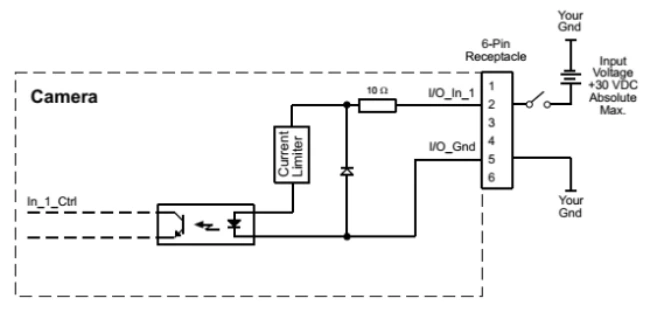
2. 信號(hào)隔離原則
工業(yè)環(huán)境中電磁干擾可能導(dǎo)致觸發(fā)信號(hào)異常。某半導(dǎo)體產(chǎn)線因未使用光耦隔離觸發(fā)線,導(dǎo)致相機(jī)誤觸發(fā),圖像出現(xiàn)周期性噪點(diǎn)。改用隔離型觸發(fā)模塊后,故障率下降90%。
3. 分辨率動(dòng)態(tài)調(diào)整原則
行觸發(fā)模式下,可通過軟件動(dòng)態(tài)調(diào)整行高。例如,某檢測(cè)系統(tǒng)在檢測(cè)金屬表面劃痕時(shí),自動(dòng)將行高從10μm切換至5μm,使缺陷識(shí)別精度提升2倍。
某案例顯示,某高速線掃相機(jī)使用差分電平觸發(fā)后,觸發(fā)抖動(dòng)從200ns降至50ns,圖像模糊問題徹底解決。
個(gè)人見解:觸發(fā)模式的未來趨勢(shì)
當(dāng)前,混合觸發(fā)模式(如行觸發(fā)+幀觸發(fā))正成為主流。例如,某新型3D線掃相機(jī)通過“行觸發(fā)采集點(diǎn)云數(shù)據(jù)+幀觸發(fā)觸發(fā)深度計(jì)算”,使工業(yè)機(jī)器人抓取精度達(dá)到±0.02mm。未來,隨著AI芯片的嵌入,觸發(fā)模式可能實(shí)現(xiàn)自適應(yīng)調(diào)整——系統(tǒng)根據(jù)物體運(yùn)動(dòng)狀態(tài)自動(dòng)切換觸發(fā)策略,進(jìn)一步簡(jiǎn)化操作流程。
總結(jié)
線掃相機(jī)的幀觸發(fā)與行觸發(fā)的選擇沒有標(biāo)準(zhǔn)答案,需結(jié)合物體速度、檢測(cè)精度、系統(tǒng)成本綜合判斷。行觸發(fā)適合動(dòng)態(tài)場(chǎng)景但需精確同步,幀觸發(fā)適合靜態(tài)場(chǎng)景但需控制運(yùn)動(dòng)干擾。實(shí)際應(yīng)用中,80%的故障源于觸發(fā)信號(hào)配置錯(cuò)誤,建議在系統(tǒng)設(shè)計(jì)階段進(jìn)行壓力測(cè)試(如模擬信號(hào)抖動(dòng)、頻率突變),確保觸發(fā)鏈路的可靠性。

 返回列表
返回列表