

_1657772558.webp)
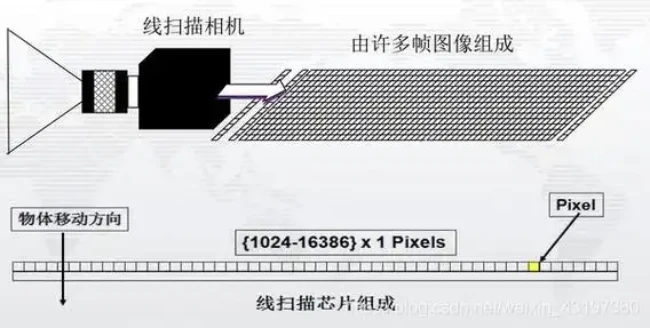
線陣相機在非勻速運動場景中的觸發(fā)方式選擇
在非勻速運動的場景中,線陣相機適合使用行觸發(fā)方式。這種觸發(fā)模式能夠逐行獨立控制圖像采集,有效適應被測物運動速度的波動,避免因速度不均勻導致的圖像模糊或錯位問題。行觸發(fā)的核心優(yōu)勢在于其對運動狀態(tài)變化的實時響應能力,確保每一行像素的采集時間與被測物的實際位置精確匹配。
行觸發(fā)的原理與適用性
線陣相機的行觸發(fā)模式通過外部信號(如編碼器或傳感器)控制每一行的采集時機。當被測物運動速度發(fā)生變化時,行觸發(fā)能夠動態(tài)調(diào)整相鄰行之間的采集間隔,從而保持圖像的連續(xù)性和清晰度。例如,在金屬帶材檢測中,若材料因機械振動出現(xiàn)局部速度波動,行觸發(fā)可通過編碼器反饋的實時位置信號調(diào)整采集節(jié)奏,確保每行數(shù)據(jù)對應材料表面的準確位置。
與幀觸發(fā)不同,行觸發(fā)不依賴固定的幀率,而是以單行像素為最小采集單元。這種特性使其在非勻速場景中更具靈活性。例如,在印刷行業(yè)中,紙張可能因傳送帶抖動產(chǎn)生速度不均,行觸發(fā)能夠通過逐行采集消除因速度變化導致的圖像重影。
案例分析:行觸發(fā)在金屬帶材檢測中的應用
某金屬加工廠使用線陣相機檢測高速運動的金屬帶材表面缺陷。初期采用幀觸發(fā)模式時,帶材因傳動系統(tǒng)振動產(chǎn)生的速度波動導致圖像局部模糊。改用行觸發(fā)后,通過編碼器與相機的同步信號,每行采集間隔隨帶材實際速度動態(tài)調(diào)整。技術人員發(fā)現(xiàn),行觸發(fā)模式下圖像質(zhì)量顯著提升,缺陷識別率提高15%,且無需額外增加硬件成本。
該案例表明,行觸發(fā)的實時性補償了機械系統(tǒng)的非理想狀態(tài),驗證了其在工業(yè)場景中的實用性。
常見問題與解答
Q1:行觸發(fā)如何適應被測物速度的突然變化?
行觸發(fā)通過外部編碼器或傳感器實時監(jiān)測被測物的位置,當速度突變時,觸發(fā)信號間隔自動調(diào)整。例如,若被測物突然減速,行觸發(fā)會延長相鄰行的采集間隔,避免因速度降低導致的像素行堆積。
Q2:幀觸發(fā)在非勻速場景中為何效果不佳?
幀觸發(fā)依賴固定時間間隔采集整幀圖像,若被測物速度波動,單幀內(nèi)多行像素對應的物理位置會偏離預期,導致圖像拉伸或壓縮。例如,在紡織品檢測中,布料速度不穩(wěn)定時,幀觸發(fā)易產(chǎn)生條紋狀偽影,而行觸發(fā)可逐行修正采集時間。
Q3:行觸發(fā)是否需要額外硬件支持?
行觸發(fā)通常需要編碼器或位置傳感器提供反饋信號,但多數(shù)工業(yè)相機已集成相關接口。例如,GigE接口的線陣相機支持直接接入旋轉編碼器,通過硬件級同步實現(xiàn)高精度觸發(fā)。
Q4:行觸發(fā)能否用于分時頻閃等特殊成像技術?
是的,行觸發(fā)允許獨立控制每行的曝光時間和光源頻閃時機。例如,在高速運動物體的HDR成像中,可通過行觸發(fā)為不同行設置長短曝光組合,同時適應速度變化。
Q5:行觸發(fā)的局限性是什么?
行觸發(fā)對觸發(fā)信號的穩(wěn)定性要求較高。若編碼器信號存在噪聲或延遲,可能導致采集間隔誤差。此外,當被測物反向運動時,需配合特定算法修正觸發(fā)相位。
技術對比與個人見解
從技術角度看,行觸發(fā)的靈活性遠超幀觸發(fā),但其性能依賴于觸發(fā)信號的精度。在實際應用中,筆者建議優(yōu)先評估被測物速度波動范圍:若速度變化超過±10%,行觸發(fā)是更優(yōu)選擇;若波動較小,幀觸發(fā)仍可滿足需求且簡化系統(tǒng)設計。
此外,行觸發(fā)的調(diào)試難度相對較高。例如,編碼器與相機的信號同步需考慮傳輸延遲,某些場景下需通過軟件補償算法優(yōu)化觸發(fā)時序。筆者認為,未來線陣相機的發(fā)展方向應聚焦于內(nèi)置智能觸發(fā)邏輯,通過AI算法預測速度變化趨勢,進一步降低人工調(diào)試成本。
結論
行觸發(fā)模式憑借其逐行可控性,成為非勻速運動場景的首選方案。從金屬加工到印刷檢測,其應用案例驗證了其應對速度波動的能力。盡管存在調(diào)試復雜度高的問題,但通過合理配置硬件與算法,仍能實現(xiàn)高穩(wěn)定性的圖像采集。對于需要兼顧速度變化與檢測精度的工業(yè)場景,行觸發(fā)仍是不可替代的技術方案。

 返回列表
返回列表